VIP专区
网上工作室
Vtec协同创新中心
网站首页
图片新闻
信息快递
通知通告
加盟企业
技术成果
首页
>
产业联盟
>
应用方案
> 详情
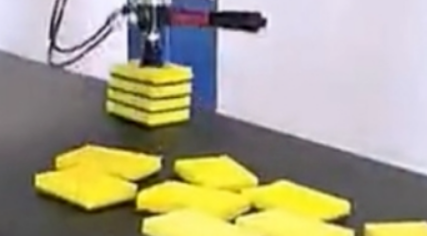
博力实多机器人联动饼干码垛装箱生产线方案
发布时间:2021年09月26日
通过视觉定位,每次拾取1块φ60mm的饼干码垛进纸箱中,控制系统根据视觉检测的拾取物位置数据,自动进行五台机器人的任务规划。
工作环境 :高温 ≤ 40℃
定位原理 :视觉定位、动态跟踪拾取、定点放置
定位精度 :±0.1mm
机器人数量:5台
工作节拍 :单台 160次/分钟
负 载 :0.5kg