客户积极践行智能制造,在早前已利用自动化生产技术在该综合生产基地实现药剂无人化生产。而实现生产车间设备与物流设备的无缝对接,进而实现工厂物流动线的完整,是客户迈向下一阶段——全面智能制造转型升级的关键一环。
未来机器人凭借领先的柔性物流无人化解决方案,以及在生物制药领域的丰富经验,携手该客户将这一愿景变成了现实。在充分了解客户需求和现场状况之后,未来机器人立足于帮助客户实现全面智能制造这一出发点,提出相应的高柔性物流无人化解决方案。
该项目部署多台未来机器人视觉导航平衡重式无人叉车及中控系统,投入运作时长已一年多,无人叉车24小时持续运作取代人工搬运,大幅度降低人工成本的同时最大程度控制货损率范围,在作业效率、作业稳定性、需求完成度上满足客户预期,继一期项目成功上线并稳定运作后,客户已计划与未来机器人协同开启二期项目合作。

项目需求
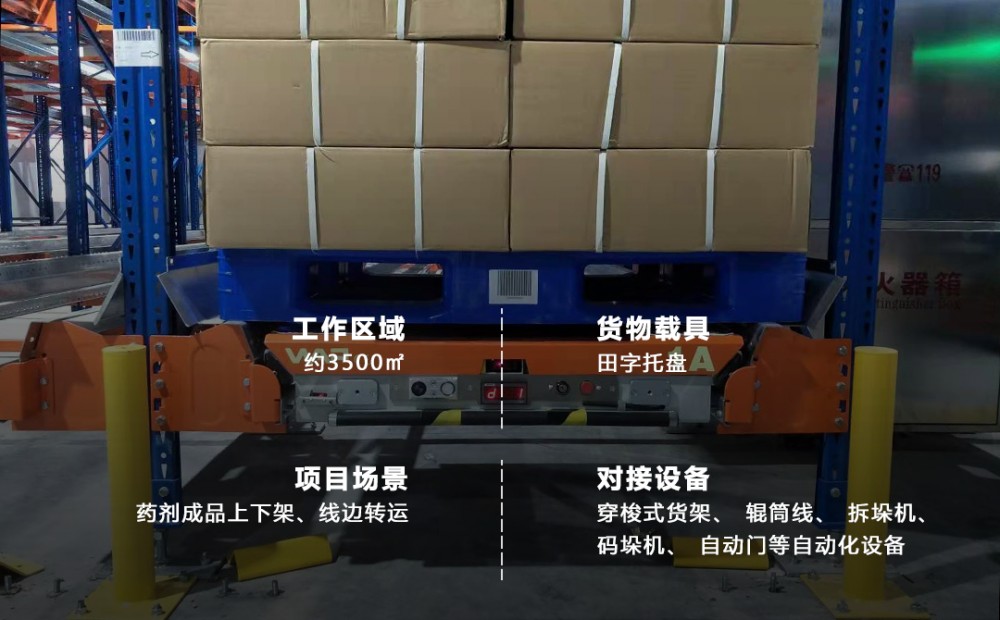
将药剂成品根据需求进行出入库以及空托转运工作,最终实现从产线到存储货架区域的无人化作业闭环。需求细分为:
无人叉车与现场辊筒线、穿梭车等自动化设备对接,将从产线下来的同一生产批次药剂成品转运至对应的货架进行存储。根据出库需求将货架上的药剂成品下架,并转运辊筒线处进行出库。灵活根据实际出库情况,搬运空托返回至拆垛机处。
项目难点
客户现场自动化程度高,自动化设备和部署系统众多,一是带来无人叉车中控系统的对接难度,二是限制了新方案对现场改造的可能性。
无人叉车需执行穿梭车搬运的任务,客户所使用穿梭车不带刹车机制,叉臂与穿梭车稍有碰撞便会造成穿梭车向前打滑,搬运任务极具挑战。穿梭式货架巷道窄,对无人叉车的托盘摆放精度要求极高。

方案制定
遵循实际场景与原有工作流程,未来机器人为客户设计了一套以视觉导航平衡重堆高式无人叉车和WCS系统为主的柔性解决方案。
在入库方面,客户WMS系统下发指令,无人叉车将穿梭车搬运至指定巷道,随后无人叉车行驶至产线处与辊筒对接,叉取货物并转运至穿梭车上,由穿梭车完成深度货位存储。
在出库方面:客户WMS系统下发指令,无人叉车将穿梭式货架上的货物搬运至指定辊筒线,辊筒线运送货物出库。
空托返回:出库货物积累的空托盘流转回产线区域,无人叉车将空托盘搬运至指定辊筒线位置,经拆垛机拆垛后流入机械臂处装货。
方案亮点
自适应客户现场,无需进行任何场地或设备的改造,整体方案柔性水平高,部署成本低、耗时短。
未来机器人WCS系统兼容性强,与现场其他系统对接良好,轻松实现系统间的兼容与集成。
无人叉车自动扫描条形码,即时将托盘信息上传至WMS系统,实现货物信息和库位信息绑定,准确率高,0件货物遗漏,满足货物/库位信息智能化管理需求。
视觉导航无人叉车的定位、感知和控制精度高,可随穿梭车的停车位姿进行自身位姿和叉臂末端位姿的自适应调整,精度在10mm以内,规避与无刹车机制穿梭车碰撞的可能性,实现平稳叉取。